Spanning Tree Enumeration
Pawel Winter found a way to enumerate all spanning trees in a simple connected graph $G(V, E)$ without repetition. The algorithm runs in $O(n + m + t \cdot n)$ where $t$ is the number of spanning trees and $n = |V|, m = |E|$.
Proper Labeling
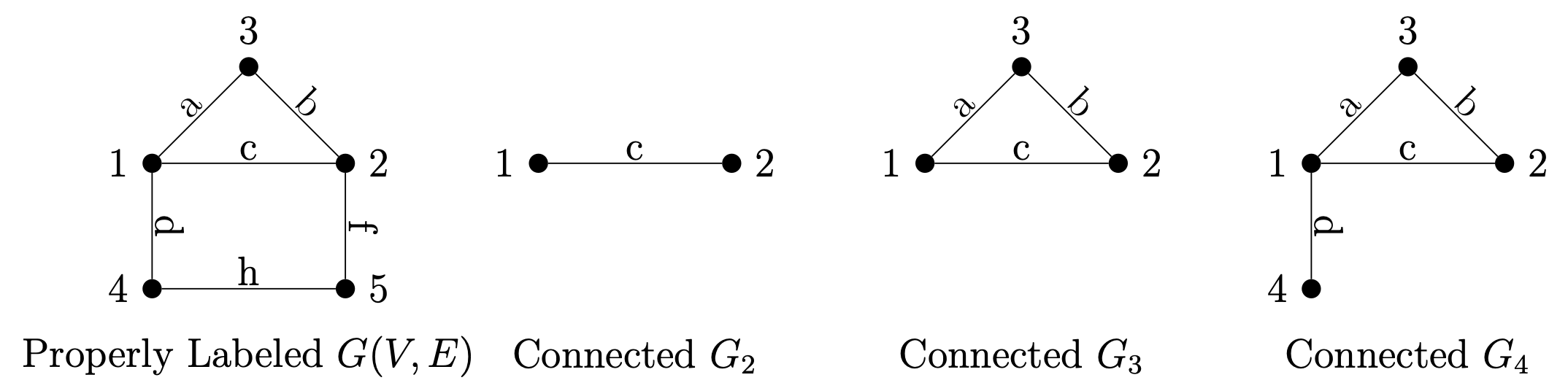
The enuemration algorithm requires a preprocessing that properly labels the vertices such that any subgraph $G_k$ containing the first $k$ vertices ${v_1, \dots, v_k}$ is connected. The figure below shows a properly labeled graph $G(V, E)$ where $G_2$, $G_3$ and $G_4$ are connected.

To be, or not to be, that is the recursion
The algorithm recursively makes decision on whether to include an edge in the spanning tree. Each decision about an edge $e$ leads to two mutually exclusive sets of spanning tree, a set of trees with $e$ and the other without it.
Once the graph is properly labeled, the algorithm starts the decision making from the highest numbered vertex (5 in our example) as shown below.

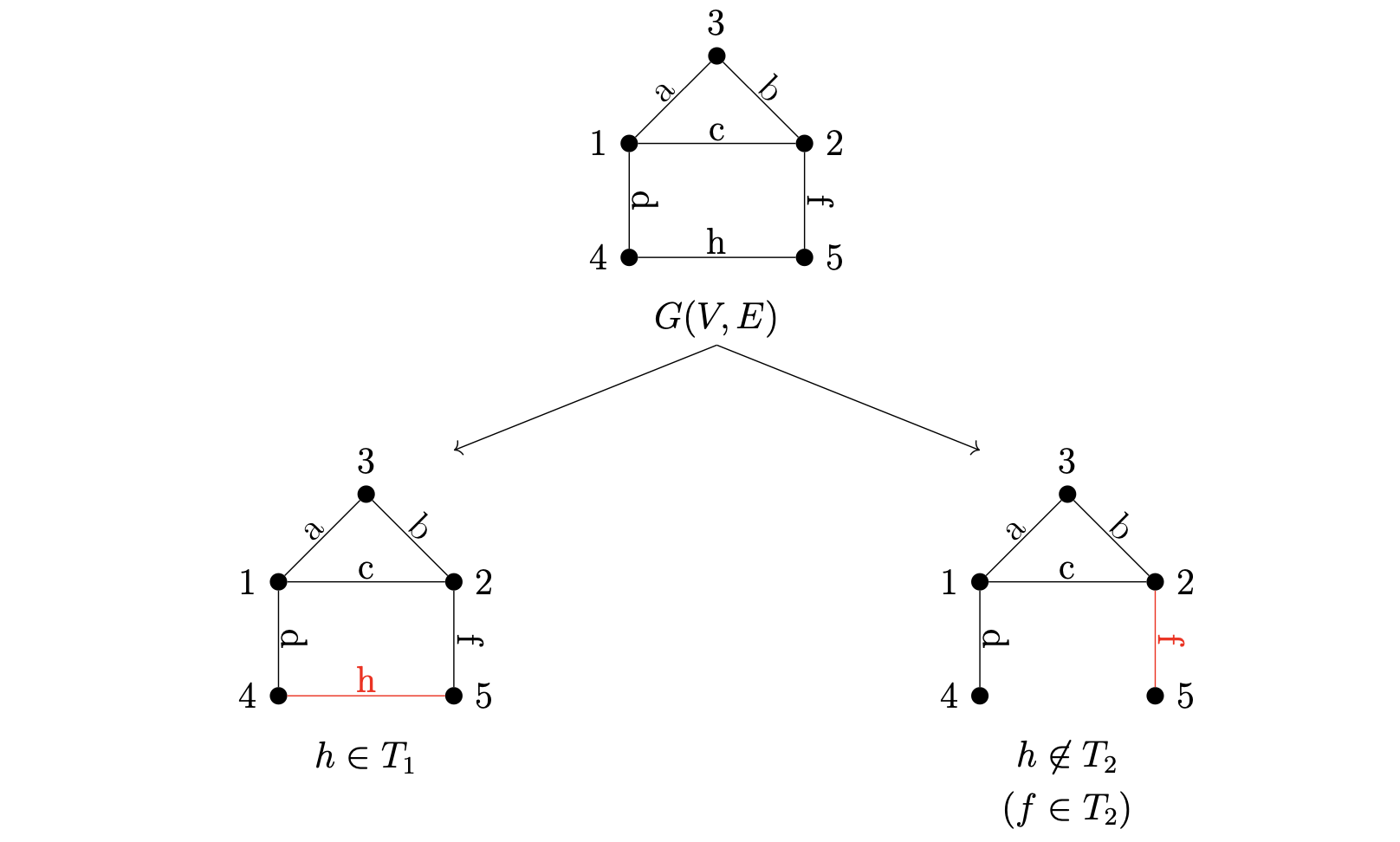
The set of spanning trees $T_1$ all contains the edge $h$, while the set $T_2$ doesn’t. The exclusion of $h$ from the spanning tree requires $f$ to be a part of any spanning tree in $T_2$.
So at each vertex $j$, this to-be-or-not-to-be decision breaks down to two aspects.
- To include the edge $(j, i)$ where $i < j$
- To exclude all the edges $(j, k)$ where $k \in (i, j)$
Decision modeled as Contraction
The decision sequence is modeled as a series of contractions, where each concerns a vertex from $n$ to $2$.
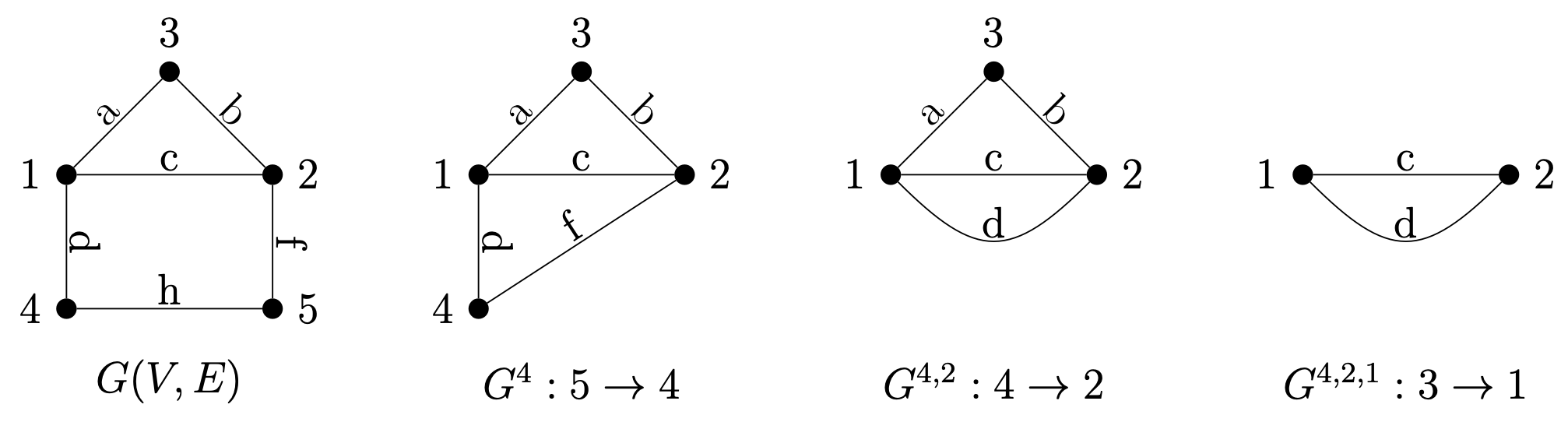
Let’s consider the example below where the first decison to include $h$ would translate to a contraction from 5 to 4, while leaving out the edges to exclude, $(5, k)$ s.t. $k\in (4, 5)$, which happens to be none here. After the contraction, the edge $f = (5, 2)$ becomes $f = (4, 2)$ and is still available for selection. The second decision to include $f = (4, 2)$ means a contraction from 4 to 2, with no edge to exclude either. The third decision to include $a = (3, 1)$ means a contraction from 3 to 1, making $b = (3, 2)$ the edge to exclude. The final decision to include either $c = (2, 1)$ or $d = (2, 1)$ means a contraction from 2 to 1.

A contraction process generates some intermediate multigraphs. Each twofold decision now becomes,
- To include all the parallel edges $(j, i)$ where $i < j$
- To exclude all the parallel edges $(j, k)$ where $k \in (i, j)$
The process eliminates/contracts the vertices one after another in descending order until there is only the vertex 1. When a vertex is contracted, an edge is chosen to be included to form a spanning tree. The example above goes like $(5 \rightarrow 4, 4 \rightarrow 2, 3 \rightarrow 1, 2 \rightarrow 1)$. As the sources of contraction are always $n, n-1, \dots, 2$, the process can be compactly expressed with the targets as $(4, 2, 1, 1)$.
We use $G^4$ to denote the multigraph after contracting 5 to 4 and $G^{4, 2, 1, 1}$ to denote the graph with only the vertex 1 after contracting vertices one by one following the process above.
The decision tree of contraction process would look something like the one below.

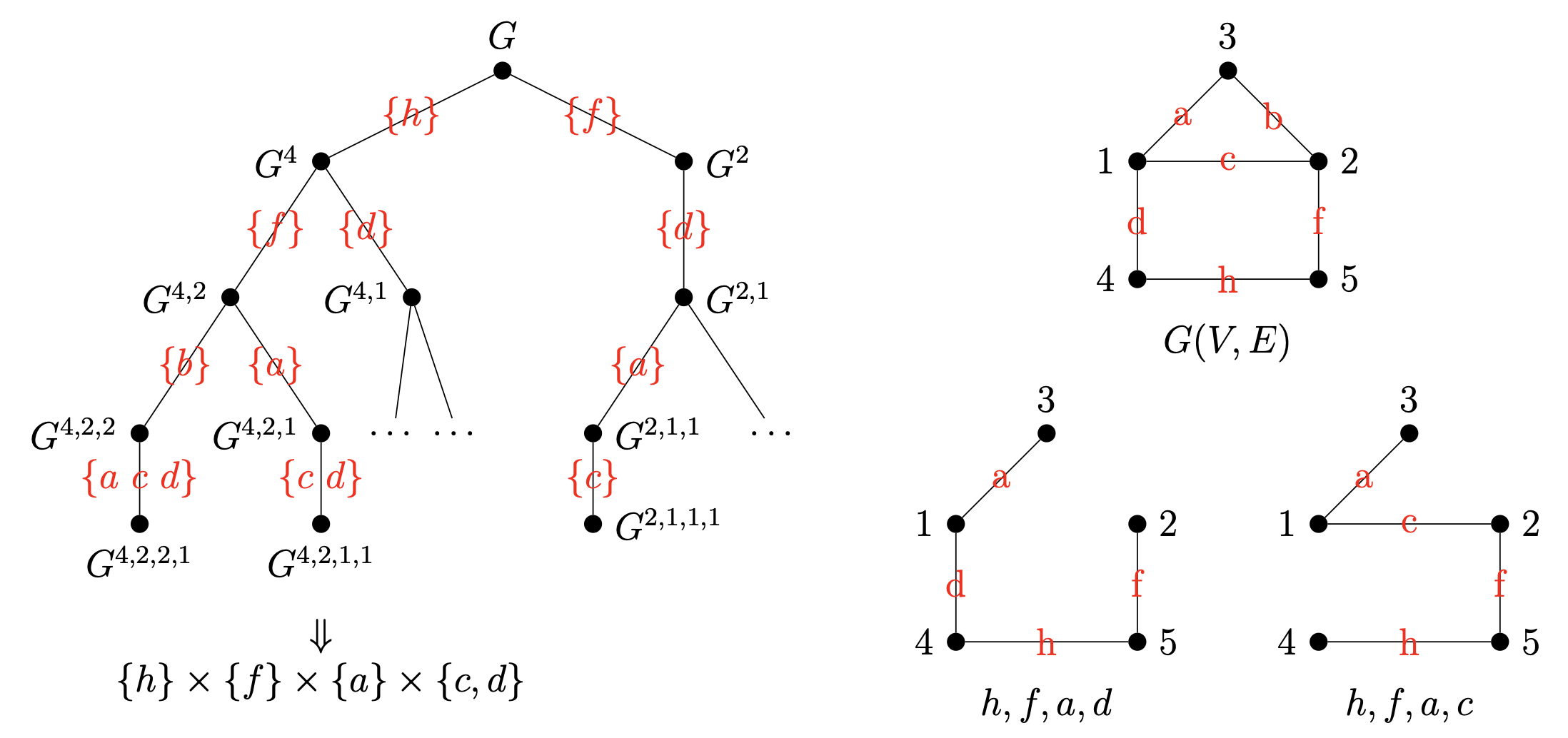
The cartesian product of all sets of parallet edges along the path from the root $G$ to the leaf $G^{4, 2, 1, 1}$ are the spanning trees generated by this contraction process, one with edges $h, f, a, d$ and the other with $h, f, a, c$.
Higher Degree, Lower Number, Shorter Delay
The closer to the leaves a decision tree branches out, the smaller enumeration delay is. Because the path from one leaf to another is shorter. So it is desirable to assign smaller numbers to vertices with higher degrees during the proper labeling.
Contraction Algorithm
The preprocessing properly labels the vertices and generates the following as the inputs to the recursive enumeration algorithm.
$v2e$ is a vertex-to-edge mapping. It is an array of pointers, mapping the integer ID of a vertex to a set of parallel edges connecting to vertices with smaller IDs. Each element of the array points to a doubly linked list.
\[v2e[3] = e(3, 3) \leftrightarrow e(3, 1) \leftrightarrow e(3, 2)\]The array element above points to a doubly linked list of parallel edges from the vertex 3 to the vertices 1 and 2. There is always a placeholder $e(j, j) \in v2e[j]$ like $e(3, 3)$.
Given a multigraph $G(V, E)$, the size of $v2e$ equals the number of vertices, $|v2e| = |V|$. Each element $v2e[j]$ has the following attributes.
- $v2e[j].head$ : the head of the doubly linked list
- $v2e[j].tail$ : the end of the doubly linked list
The doubly linked list is not necessarily sorted, but the placeholder is always initialized to be the head $v2e[j].head = e(j, j)$.
$e(j, i)$ is a set of parallel edges between the vertices $j$ and $i$, where $j > i$. For example, $e(3, 2) = \lbrace a, b \rbrace$ comprises 2 parallel edges between 3 and 2. Each parallel edge set has the following attributes.
- $e.j$ : the end vertex of $e$ with larger ID
- $e.i$ : the end vertex of $e$ with smaller ID
- $e.ids$ : a set of alphabetic/integer IDs of the parallel edges
- $e.prev$ : the previous item in the linked list $v2e[j]$
- $e.next$ : the next item in the linked list $v2e[j]$
There is also an $n \times n$ matrix where each element in cell $(j, i)$ is a pointer to $e(j, i)$ in the linked list $v2e[j]$ to facilitate fast access of the parallel edge sets.
The recursive algorithm is shown below.

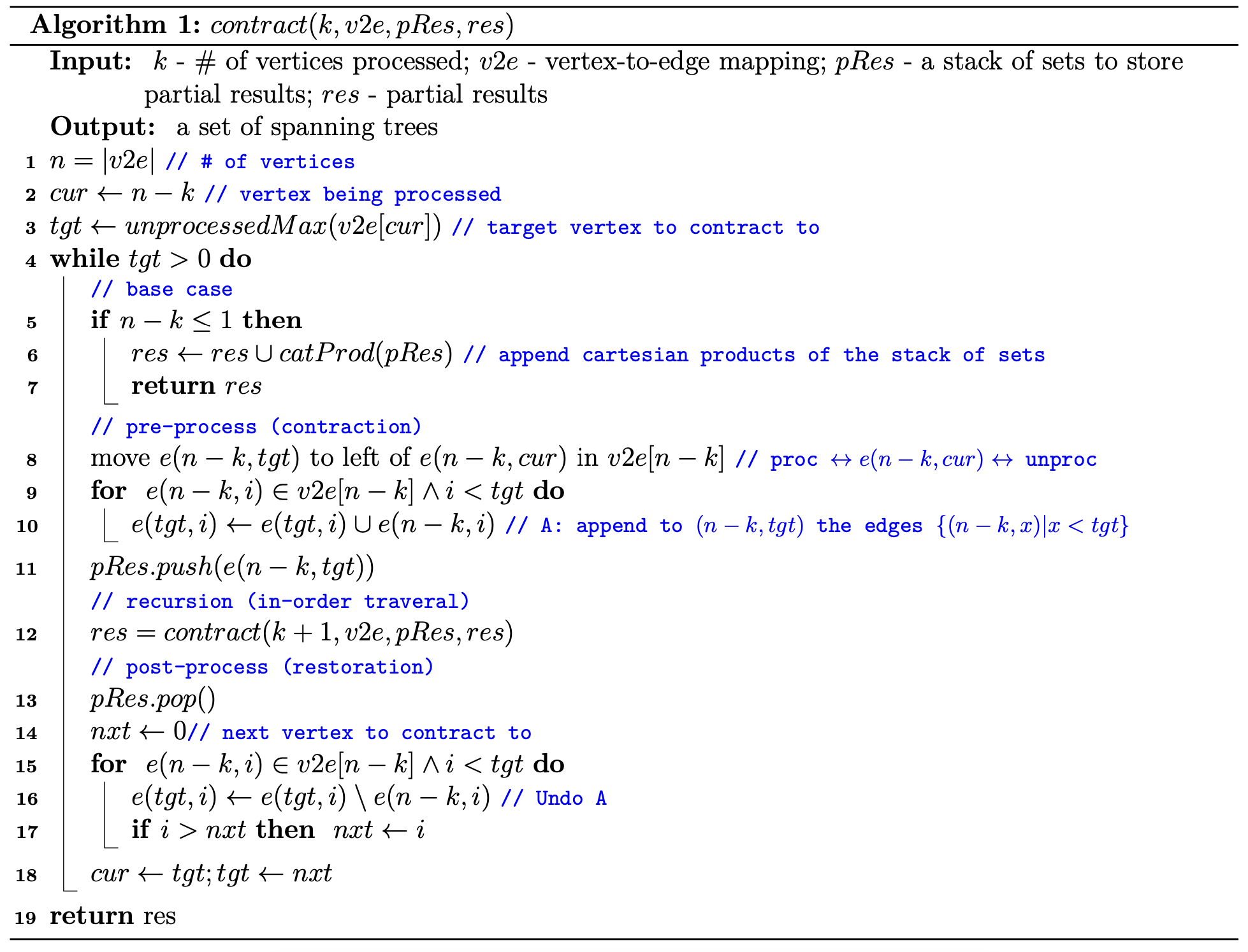
Provided that $res$ is passed down by reference in the recursion, it is an any-time algorithm such that $res$ contains all the spanning trees countered so far.
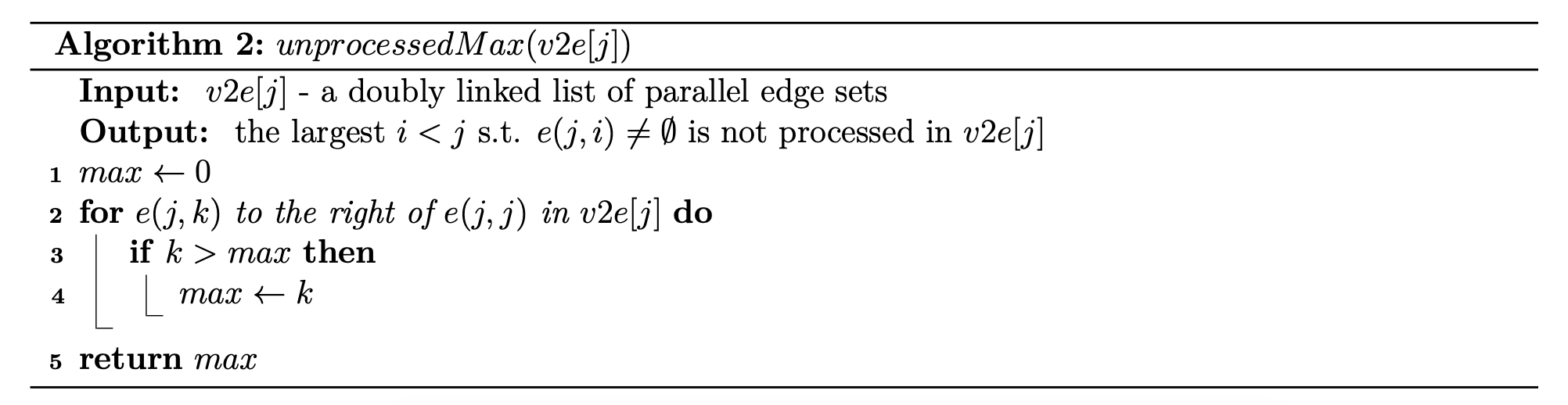
The helper to find the target vertex to contract to is shown below.